Validation
We validate our CathSim simulator and robots through testing on both phantom models and animal subjects.
Phantom Setup
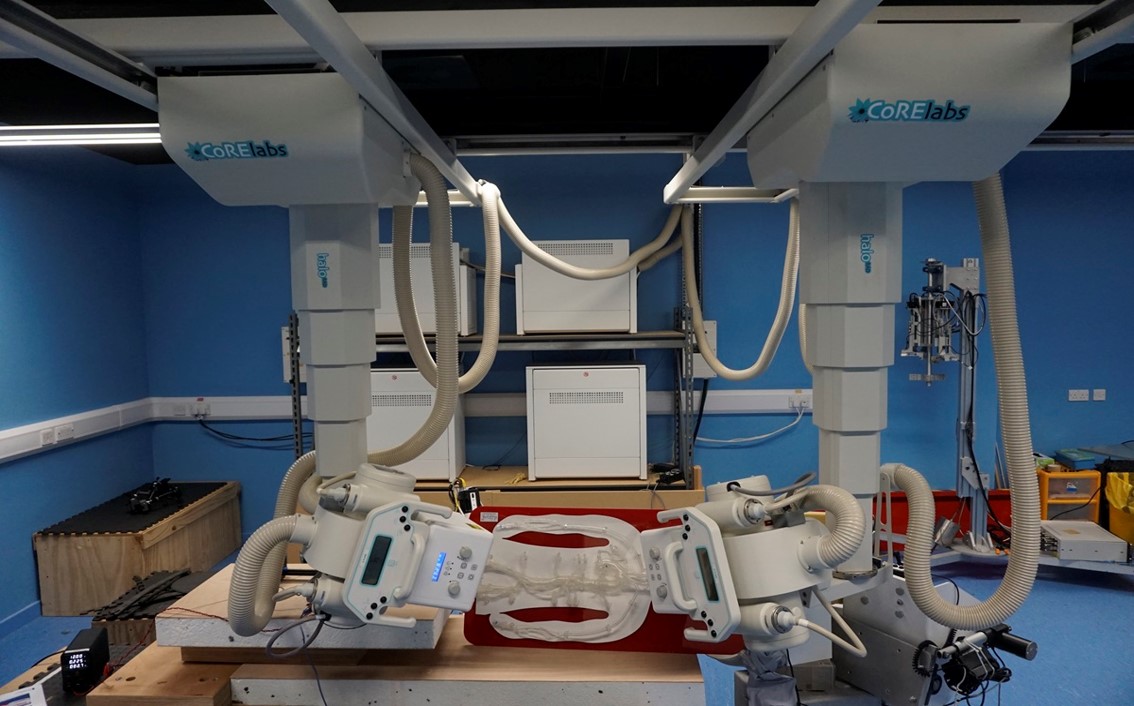
To simulate human vascular anatomy, we use a half-body vascular phantom model, which is connected to a closed water circuit to mimic blood flow. We utilize a Bi-planar X-ray system equipped with 60 kW Epsilon X-ray Generators and 16-inch Image Intensifier Tubes for high-definition imaging.
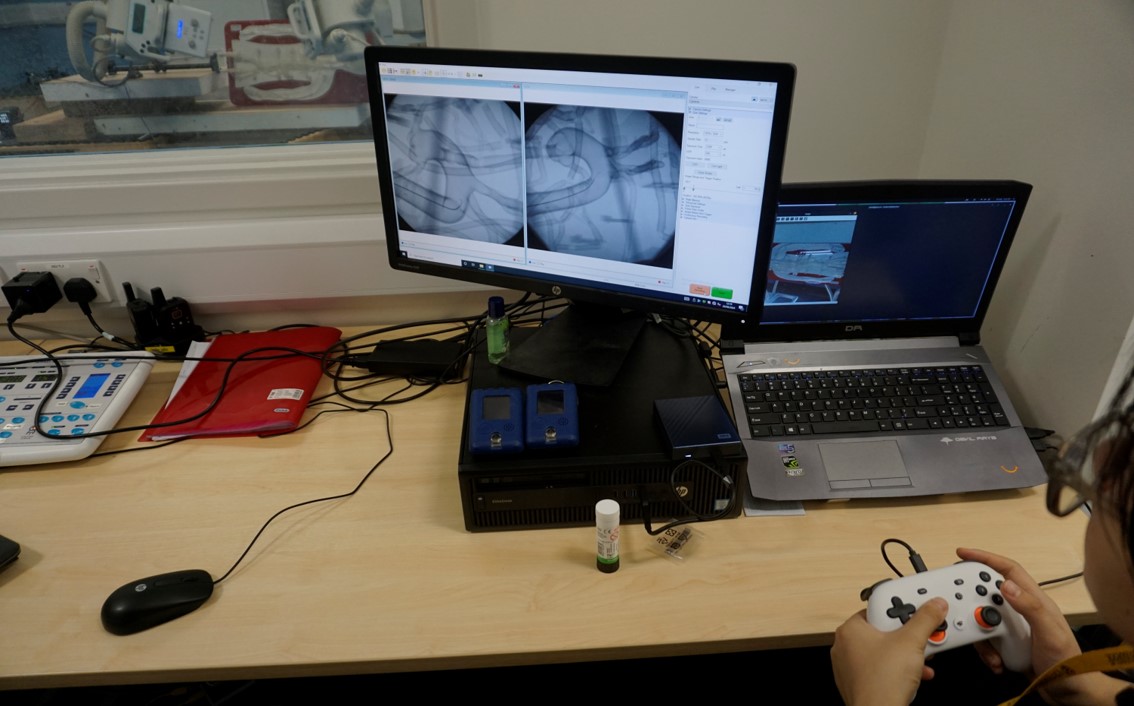
The surgeon operates the master device from a control room to drive the follower robot located in the X-ray room.
Animal Setup

We use pigs as animal subjects for our validation, as their anatomy shares similarities with that of humans.
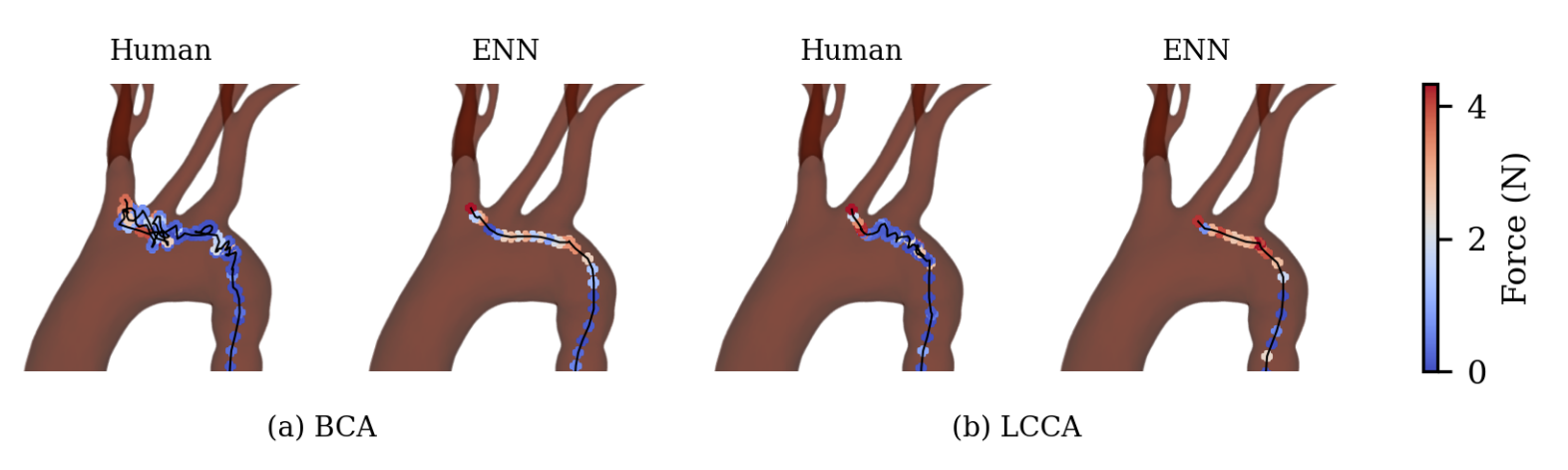
Catheterization Target
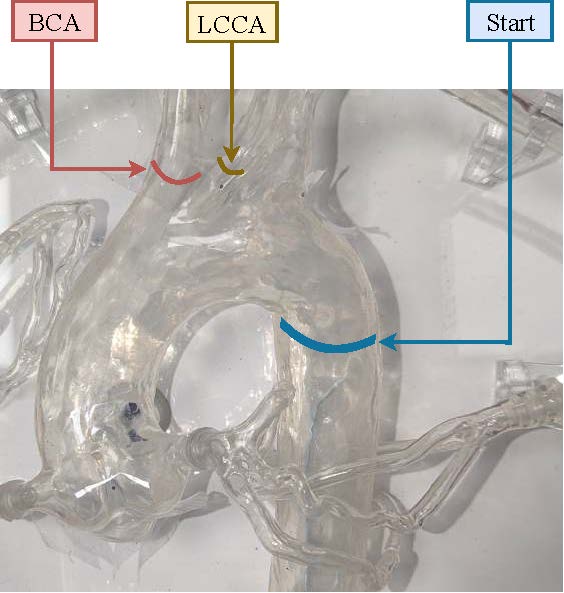
The catheterization targets are the brachiocephalic artery (BCA) and the left common carotid artery (LCCA).
SplineFormer Network
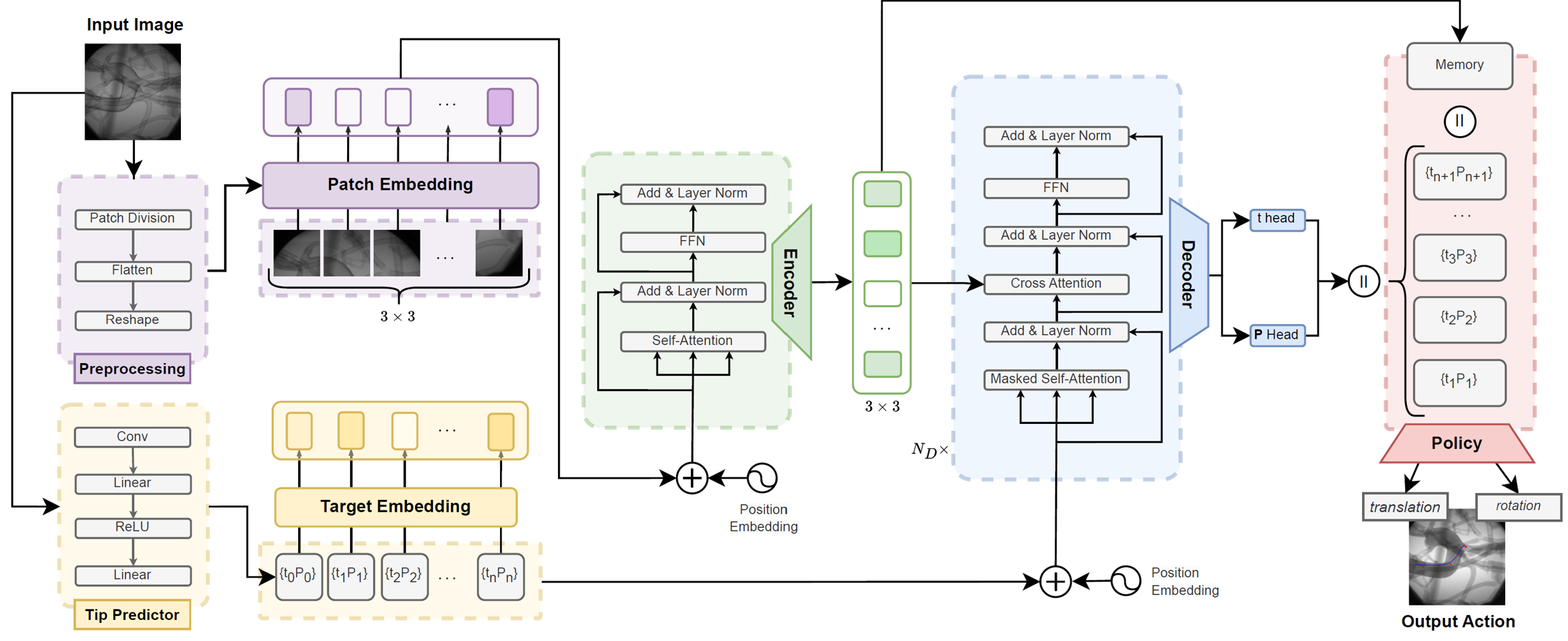
We propose SplineFormer, a new transformer-based architecture, designed specifically to predict the continuous, smooth shape of the guidewire in an explainable way.
Expert Navigation Network
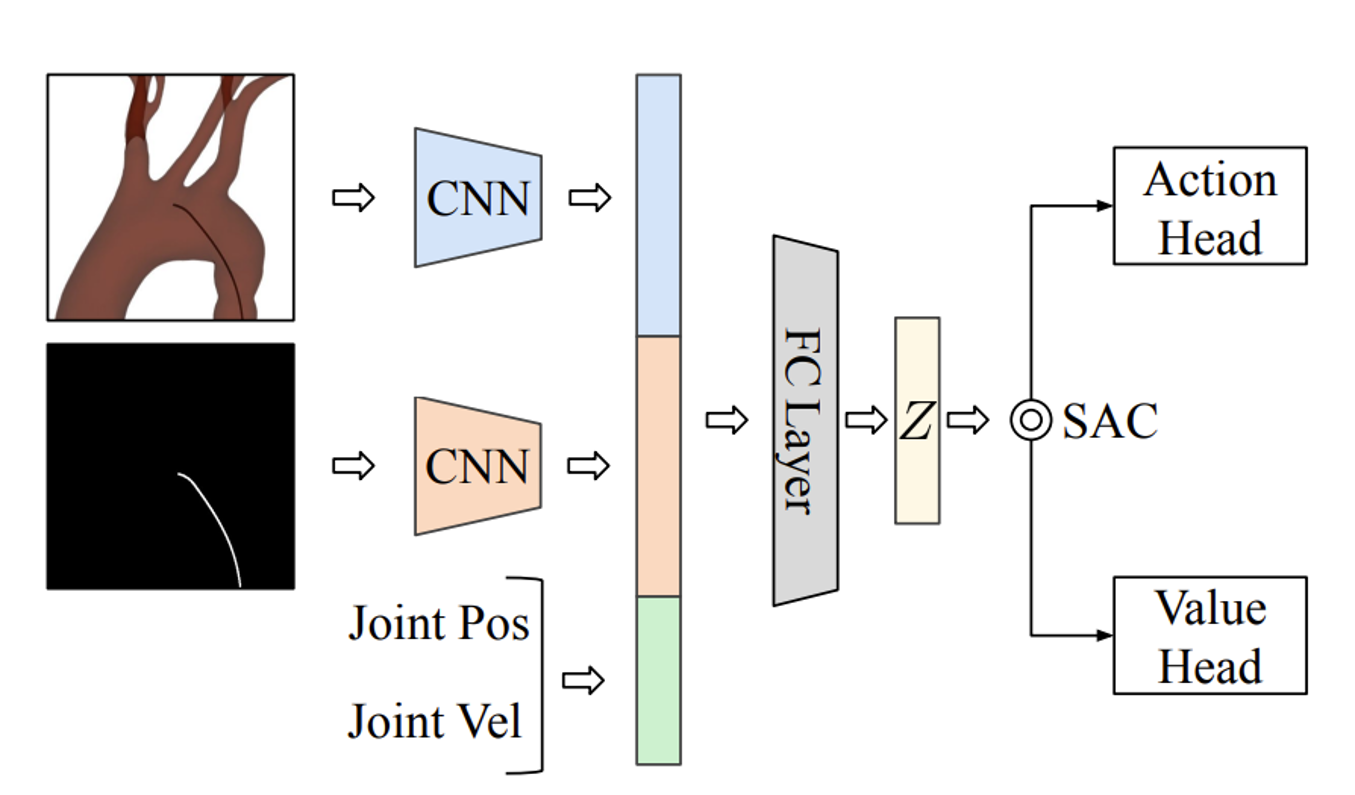
Our Expert Navigation Network is a multimodal system trained using CathSim simulator and subsequently transferred to the real robot.
Segmentation Model
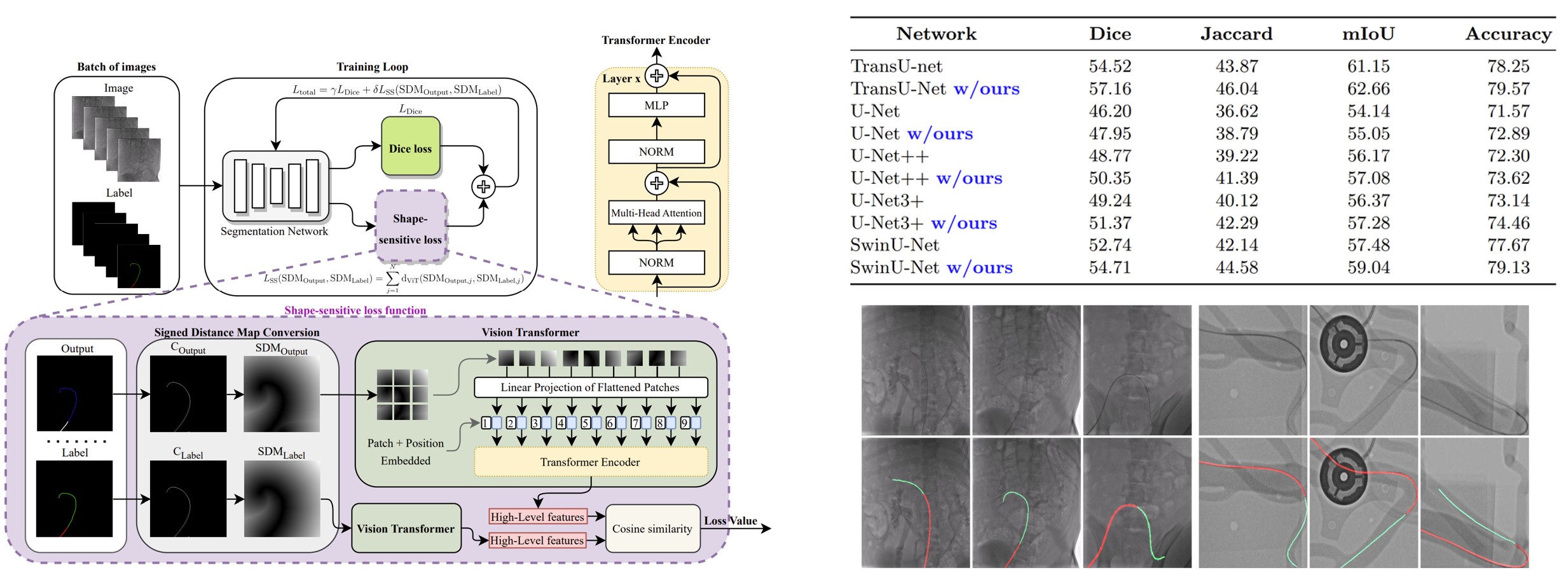
We introduce a shape-sensitive loss function for catheter and guidewire segmentation and utilize it in a vision transformer network to establish a new state-of-the-art result on a large-scale X-ray images dataset.
Results
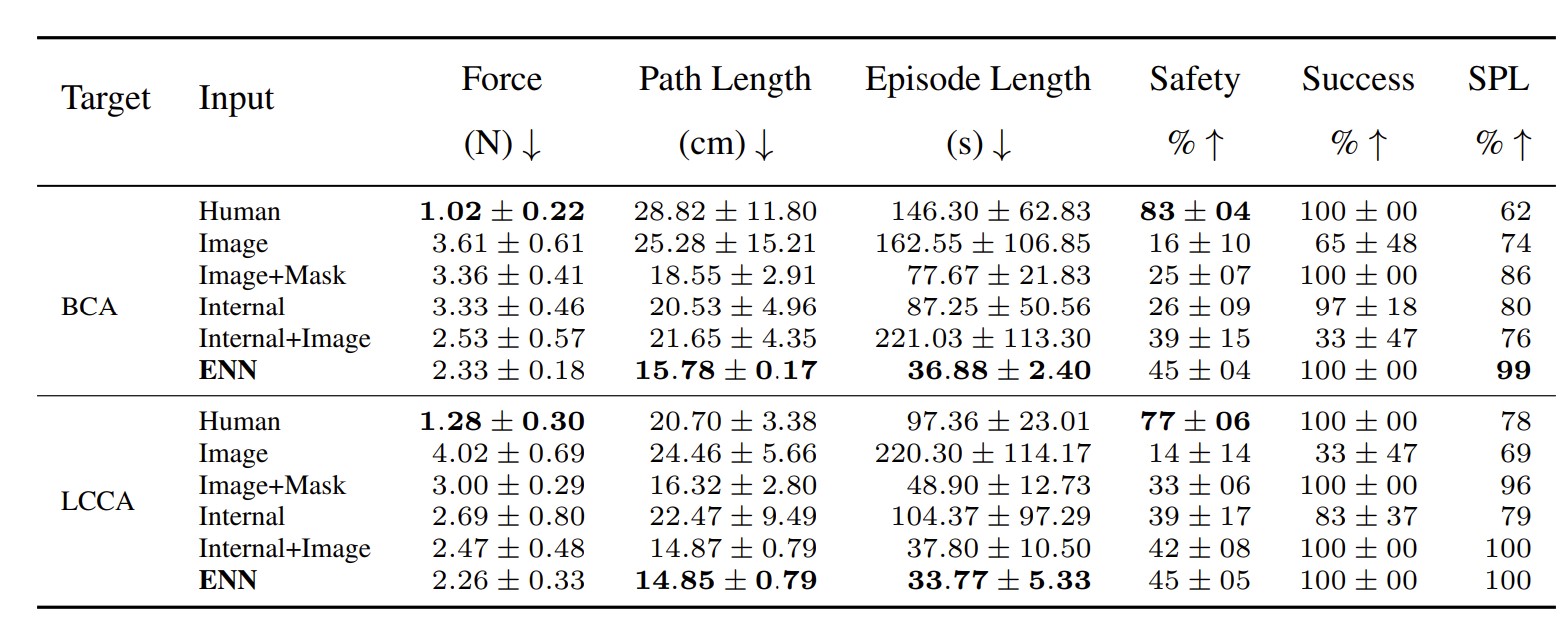
The results demonstrate the successful integration of simulation, machine learning, and vision technologies to achieve autonomous catheterization.