Introduction
Welcome to CathSim Project!
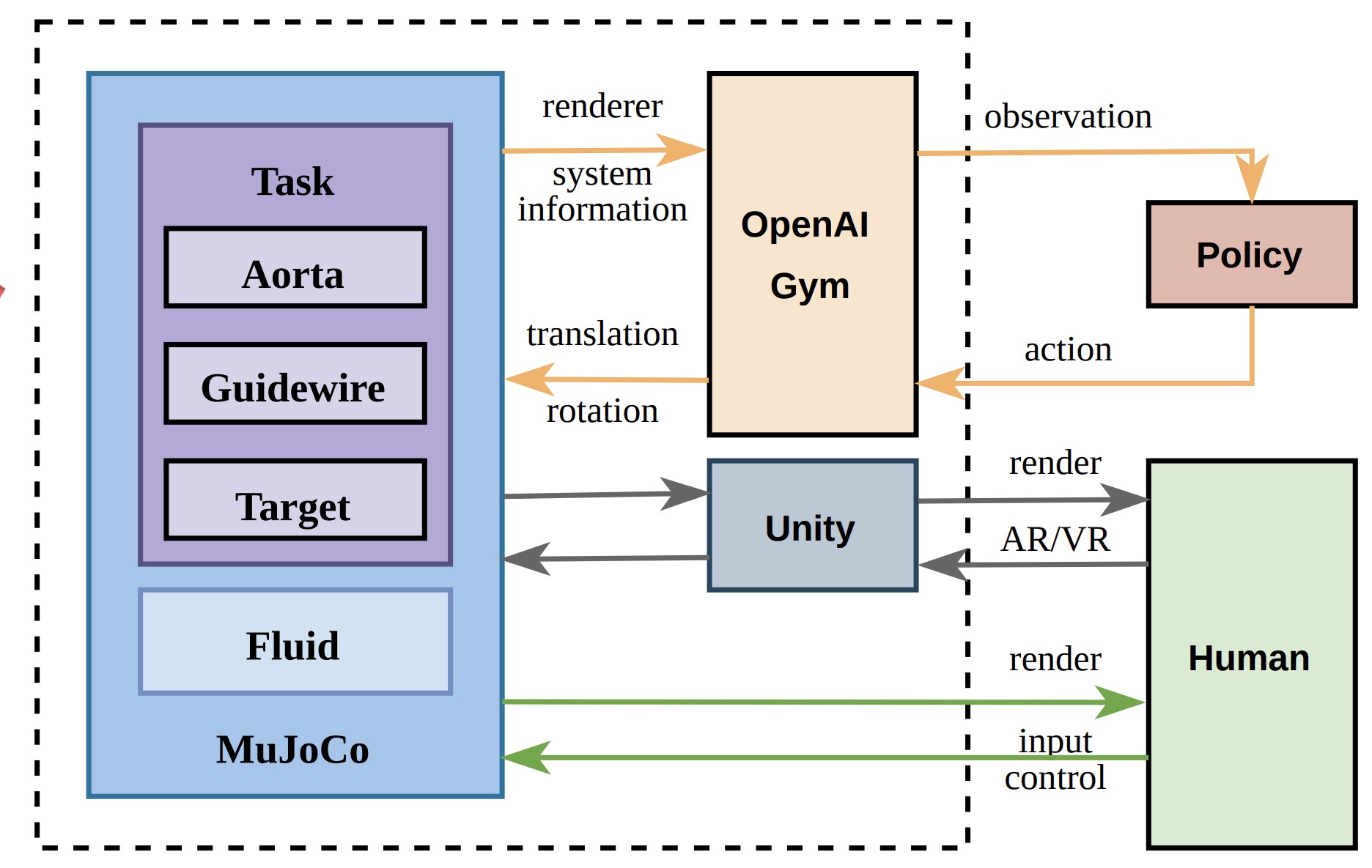
CathSim provides a versatile platform for both research and training in robot-assisted endovascular intervention. The simulator is designed to support autonomous catheterization, data generation, and medical training via AR/VR devices.
Components

The CathSim simulator includes four components: Follower Robot, Aorta Phantom, Guidewire Model, Blood Simulation and AR/VR.
Aortic Models
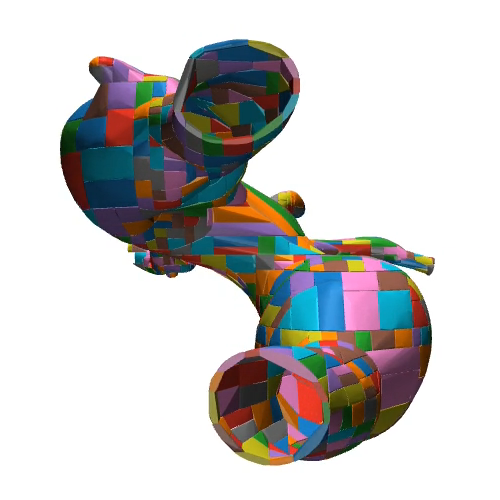
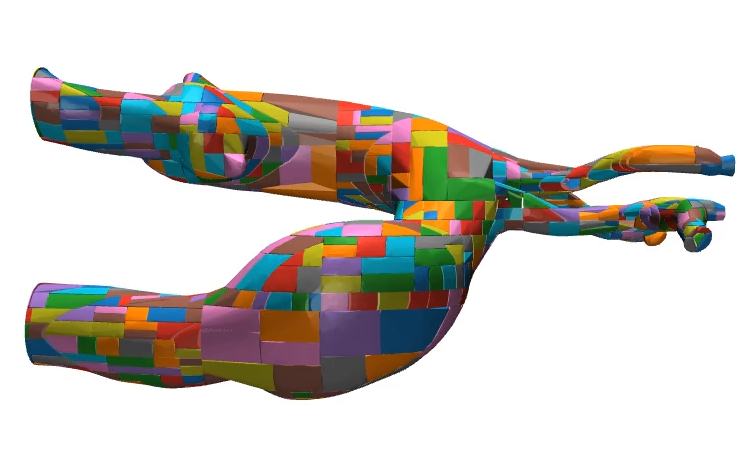
Detailed 3D meshes from silicone-based phantoms are used to simulate different aortic structures. Convex hulls generated through V-HACD simplify collision modeling.
Guidewire
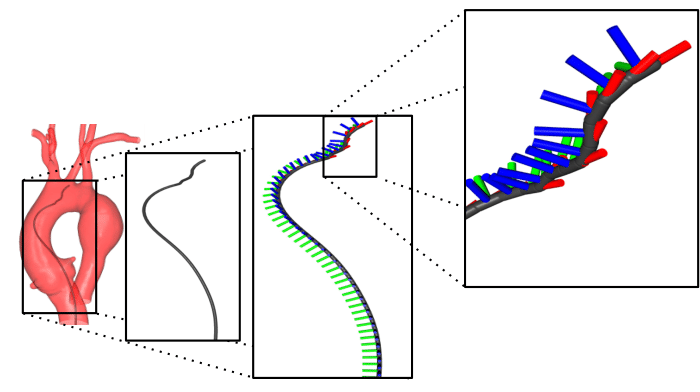
The guidewire is a flexible, segmented structure composed of a main body and a softer tip, connected through revolute or spherical joints. This structure allows real-time simulations with accurate, low-cost shape predictions and a capsule-based collision model to mimic real catheter behavior.
Blood Simulation
For simplicity, blood is modeled as an incompressible Newtonian fluid with rigid vessel walls. This approach reduces computational demands while realistically opposing guidewire movements.
Robotic Follower

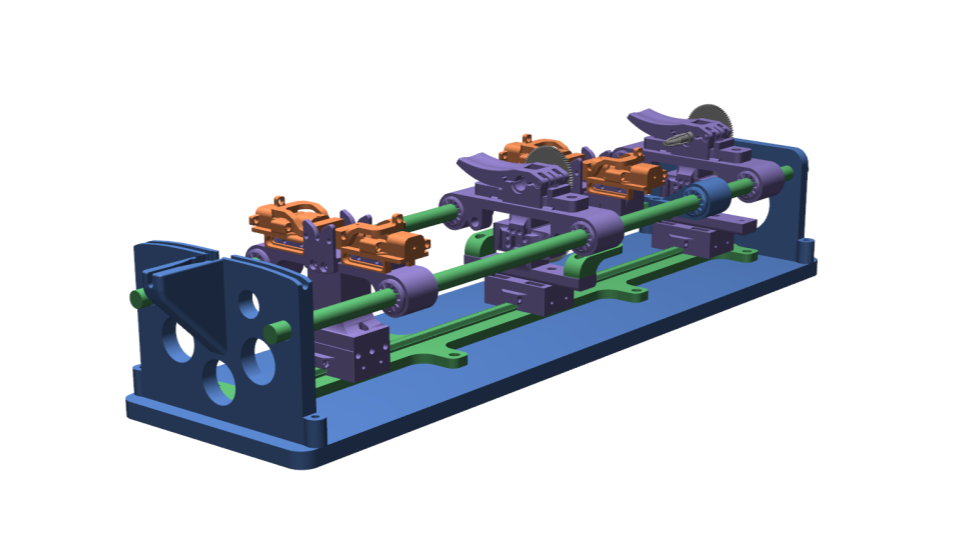
The robotic follower maintains a linear relationship between leader and follower positions. Our simulation includes four modular platforms attached to a main rail, with prismatic joints for translational movement and revolute joints for rotation.
Actuation
CathBot’s actuation relies on frictional forces between the guidewire and clamps. In our model, friction prevents slippage, simplifying control over joints without simulating sliding friction. This approach enhances computational efficiency by reducing contact points.
Validation
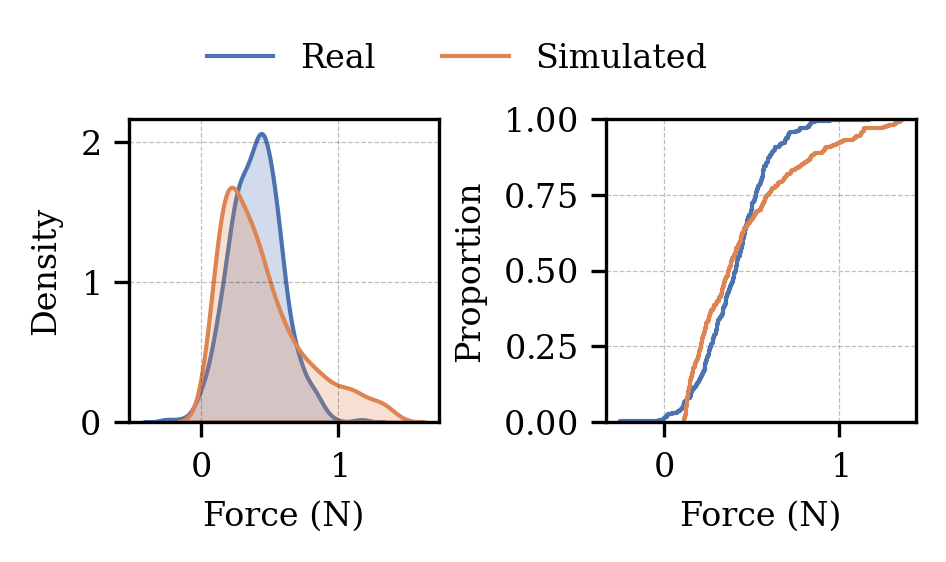
Statistical Analysis
We use the Mann-Whitney test to compare the empirical force distribution from our CathSim simulator and the real robot. The results confirm that our simulator’s force distribution resembles that of the real system, validating CathSim’s capability to mimic real-world robotic interactions.
User Study
A study with 10 participants assessed CathSim’s realism and effectiveness. Participants, unfamiliar with endovascular procedures, first watched a fluoroscopic video of real navigation, then interacted with CathSim to perform tasks like cannulating key arteries. Feedback was collected on a 5-point Likert scale across seven criteria:
- Anatomical Accuracy – Realism in replicating vessel anatomy.
- Navigational Realism – Authenticity in visual navigation experience.
- User Satisfaction – Overall satisfaction with simulator performance.
- Friction Accuracy – Accuracy in simulating guidewire resistance.
- Interaction Realism – Realism in guidewire-vessel interaction visuals.
- Motion Accuracy – Alignment of guidewire movement with real-life expectations.
- Visual Realism – Visual authenticity of the guidewire in the simulation.
Results
| Question | Average | STD |
|---|---|---|
| Anatomical Accuracy | 4.57 | 0.53 |
| Navigation Realism | 3.86 | 0.69 |
| User Satisfaction | 4.43 | 0.53 |
| Friction Accuracy | 4.00 | 0.82 |
| Interaction Realism | 3.75 | 0.96 |
| Motion Accuracy | 4.25 | 0.50 |
| Visual Realism | 3.67 | 1.15 |
Overall, users provided positive feedback, although visual realism was identified as an area for potential improvement.